Mengintegrasikan semangat keterbukaan ke dalam masyarakat berbasis mesin: OpenMind memadukan pemikiran dan tatanan secara harmonis
Selain Agen AI, robot berwujud menjadi salah satu pilar aplikasi utama di era kecerdasan buatan. Morgan Stanley memproyeksikan dalam laporannya bahwa pasar global robot humanoid bisa melampaui nilai $5 triliun pada tahun 2050.
Seiring kemajuan AI, robot kini bertransformasi dari sekadar lengan mekanis di pabrik menjadi mitra sehari-hari dalam kehidupan manusia. Mereka memperoleh kemampuan persepsi dan pemahaman melalui kecerdasan buatan, serta semakin mampu mengambil keputusan secara mandiri. Tantangannya, robot masa kini belum memiliki protokol komunikasi standar; setiap produsen memakai bahasa dan logika tersendiri, perangkat lunaknya tidak kompatibel, dan kecerdasan yang dihasilkan tidak dapat dibagikan lintas platform. Kondisinya, seperti memiliki mobil dari satu merek dan Tesla—keduanya tak mampu menilai keadaan jalan secara bersama-sama, apalagi menjalankan tugas secara kolaboratif.
OpenMind hadir untuk mengakhiri fragmentasi tersebut. Perusahaan ini tidak memproduksi robot, melainkan membangun sistem kolaboratif yang memungkinkan robot menggunakan bahasa seragam, mengikuti aturan bersama, dan menuntaskan tugas secara kolektif. Analogi sederhananya, iOS dan Android memicu gelombang inovasi aplikasi smartphone, Ethereum menghadirkan fondasi bersama bagi dunia kripto, dan OpenMind ingin mewujudkan “sistem operasi” dan “jaringan kolaborasi” global bagi robot di seluruh dunia.
Intinya, OpenMind mengembangkan sistem operasi universal untuk robot, sehingga mereka dapat melakukan persepsi, aksi, serta berkolaborasi secara aman dan terukur dalam segala lingkungan dengan koordinasi terdesentralisasi.
Siapa yang Mendukung Platform Terbuka Ini
OpenMind telah meraih pendanaan tahap seed dan Seri A senilai $20 juta yang dipimpin oleh Pantera Capital. Lebih signifikan lagi, “luas dan saling melengkapinya” modal yang diperoleh telah menghubungkan nyaris seluruh elemen strategis di sektor ini: di satu sisi, ada kekuatan jangka panjang dari ekosistem teknologi dan keuangan Barat—seperti Ribbit, Coinbase Ventures, DCG, Lightspeed Faction, Anagram, Pi Network Ventures, Topology, dan Primitive Ventures—yang memahami pergeseran paradigma pada infrastruktur kripto dan AI serta memberikan keahlian soal model, jaringan, dan kepatuhan untuk “agent economy + machine internet”; di sisi lain, ada momentum industri dari Timur—diwakili rantai pasok dan sistem produksi Sequoia China—yang tahu persis ambang teknologi dan biaya yang diperlukan “untuk mengubah prototipe menjadi produk yang skalabel.” Sinergi kedua kubu ini membawa OpenMind bukan cuma modal, melainkan jalur dan sumber daya nyata “dari laboratorium ke lini produksi, dari perangkat lunak ke produksi manufaktur.”

Jalur tersebut juga selaras dengan pergerakan pasar modal konvensional. Pada Juni 2025, ketika KraneShares meluncurkan Global Humanoid and Embodied Intelligence Index ETF (KOID), mereka memilih Iris—robot humanoid hasil kustomisasi OpenMind dan RoboStore—untuk membunyikan bel pembukaan NASDAQ, tercatat sebagai “tamu robot” pertama yang menjalankan seremonial ini dalam sejarah bursa tersebut. Peristiwa ini menjadi titik temu narasi teknologi dan keuangan, sekaligus sinyal publik mengenai “cara penetapan nilai dan penyelesaian aset mesin.”
Menurut Nihal Maunder, mitra Pantera Capital:
“Jika kita ingin mesin cerdas beroperasi di lingkungan terbuka, kita butuh jaringan intelijen terbuka. Upaya OpenMind untuk robot mirip dengan dampak Linux bagi perangkat lunak dan Ethereum bagi blockchain.”
Dari Riset ke Produksi
Jan Liphardt, pendiri OpenMind, adalah Associate Professor di Stanford University serta mantan profesor Berkeley yang memiliki rekam jejak riset mendalam di bidang data dan sistem terdistribusi, berpadu erat antara akademisi dan rekayasa. Ia mengadvokasi pemanfaatan open-source, menggantikan sistem tertutup dengan mekanisme yang bisa diaudit dan ditelusuri, serta mengintegrasikan AI, robotika, dan kriptografi melalui pendekatan lintas disiplin.
Tim inti OpenMind berasal dari institusi ternama seperti OKX Ventures, Oxford Robotics Institute, Palantir, Databricks, dan Perplexity, mencakup bidang vital seperti kontrol robot, persepsi dan navigasi, orkestrasi multimodal dan LLM, sistem terdistribusi, serta protokol on-chain. Di samping itu, tim penasihat yang terdiri dari pakar akademik dan industri (termasuk pemimpin robotika Stanford Steve Cousins, Bill Roscoe dari Oxford Blockchain Center, dan profesor AI keamanan Imperial College Alessio Lomuscio) turut menjamin bahwa robot yang dikembangkan “aman, patuh, dan andal.”
Solusi OpenMind: Arsitektur Dua Lapis, Satu Sistem Tata Kelola
OpenMind mengembangkan infrastruktur reusable agar robot dapat berkolaborasi dan berkomunikasi lintas perangkat, produsen, bahkan batas negara:
Device Side: Menyediakan sistem operasi AI-native, OM1, bagi robot fisik—menghubungkan seluruh rantai dari persepsi hingga eksekusi, sehingga beragam jenis mesin bisa memahami lingkungan dan menyelesaikan tugasnya;
Network Side: Membangun jaringan kolaborasi terdesentralisasi bernama FABRIC yang menawarkan mekanisme identitas, alokasi tugas, dan komunikasi, memastikan robot saling mengenali, berbagi tugas, dan status ketika berkolaborasi.
Kombinasi “sistem operasi + jaringan” ini memungkinkan robot tidak hanya bertindak mandiri, tetapi juga berkolaborasi, menyelaraskan proses, dan menuntaskan tugas kompleks secara kolektif dalam satu jaringan kolaboratif terpadu.
OM1: Sistem Operasi AI-Native untuk Dunia Nyata
Sama halnya dengan ponsel pintar yang perlu iOS atau Android untuk menjalankan aplikasi, robot juga membutuhkan sistem operasi untuk menjalankan model AI, memproses data sensor, membuat keputusan, dan melakukan aksi terprogram.
OM1 hadir sebagai sistem operasi AI-native bagi robot di lingkungan nyata, memungkinkan mereka melakukan persepsi, pemahaman, perencanaan, dan eksekusi tugas di berbagai skenario. Berbeda dengan sistem kontrol robot tradisional yang tertutup, OM1 bersifat open-source, modular, dan tidak tergantung jenis hardware, mampu berjalan pada humanoid, robot berkaki empat, beroda, maupun lengan robotik.
Empat Elemen Utama: Dari Persepsi Hingga Eksekusi
OM1 mengurai kecerdasan robot ke dalam empat tahapan universal: Persepsi → Memori → Perencanaan → Aksi. Seluruh alur ini sudah dimodularisasi oleh OM1 dan dirangkai dengan bahasa data seragam, membuat kapabilitas cerdas dapat dikomposisi, diganti, dan diverifikasi.
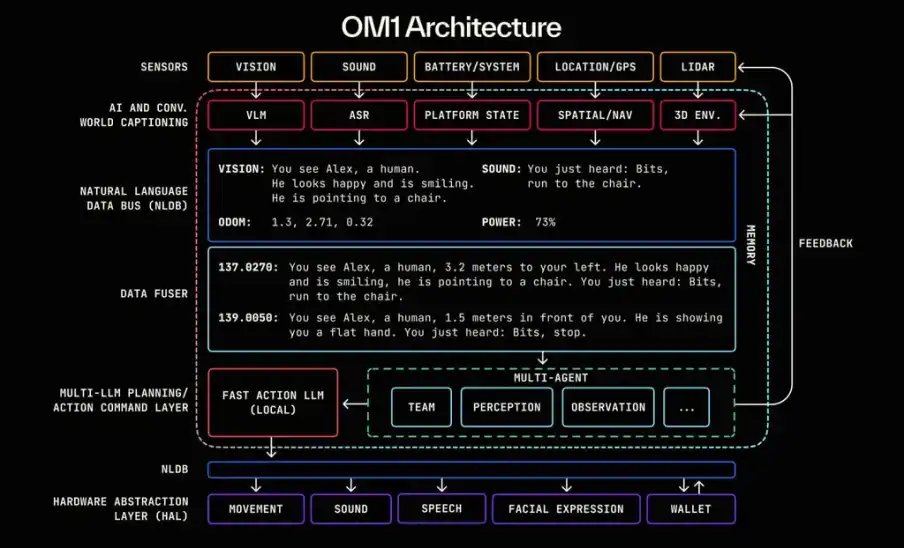
Arsitektur OM1
Lebih rinci, arsitektur tujuh lapis OM1 berfungsi sebagai berikut:
Sensor Layer menangkap informasi: kamera, LIDAR, mikrofon, status baterai, GPS, dan berbagai input persepsi multimodal lainnya.
AI + World Captioning Layer menerjemahkan informasi: model multimodal mengubah data visual, audio, dan status menjadi deskripsi bahasa alami (contoh: “Anda melihat seseorang melambaikan tangan”).
Natural Language Data Bus (NLDB) menyalurkan informasi: semua persepsi diubah ke fragmen linguistik bertanda waktu dan ditransfer antar modul.
Data Fuser menyatukan informasi: mengintegrasikan beragam input untuk menghasilkan konteks keputusan (prompt) yang utuh.
Multi-AI Planning/Decision Layer menyusun keputusan: sejumlah LLM membaca konteks dan merancang rencana aksi yang terhubung ke aturan on-chain.
NLDB downstream channel: mengirim hasil keputusan ke sistem eksekusi hardware melalui lapisan bahasa perantara.
Hardware Abstraction Layer menggerakkan aksi: mengonversi perintah bahasa menjadi instruksi kontrol tingkat rendah untuk mengoperasikan hardware (gerakan, broadcast suara, transaksi, dan sebagainya).
Quick Start, Implementasi Skala Luas
Agar “ide” dapat segera diwujudkan sebagai “tugas yang bisa dijalankan robot”, OM1 menawarkan pipeline pengembangan siap pakai: developer leluasa mendefinisikan tujuan dan batasan dengan bahasa alami menggunakan model besar, menciptakan paket skill reusable hanya dalam hitungan jam, bukan berbulan-bulan coding manual; pipeline multimodal langsung terhubung dengan LiDAR, vision, dan audio, sehingga tak perlu lagi menulis kode fusi sensor rumit; model pre-integrated seperti GPT-4o, DeepSeek, dan VLM terpopuler menghadirkan input-output suara yang siap digunakan; sistem kompatibel penuh dengan ROS2 dan Cyclone DDS serta integrasi seamless ke Unitree G1, Go2, Turtlebot, dan lengan robotik melalui Hardware Abstraction Layer; konektivitas native ke FABRIC untuk identitas, orkestrasi tugas, dan settlement on-chain, memungkinkan robot beroperasi secara mandiri maupun terhubung ke jaringan global dengan fitur pay-per-use dan audit menyeluruh.
OM1 telah sukses diuji pada berbagai skenario nyata: platform quadruped Frenchie (Unitree Go2) berhasil melalui tugas medan kompleks di USS Hornet Defense Technology Exhibition 2024; humanoid Iris (Unitree G1) melakukan interaksi manusia-mesin live di booth Coinbase pada EthDenver 2025, dan masuk ke kurikulum universitas Amerika via proyek edukasi RoboStore (salah satu distributor Unitree terbesar di AS), membawa paradigma pengembangan OM1 langsung ke lini pendidikan dan riset.
FABRIC: Jaringan Kolaborasi Manusia-Mesin Terdesentralisasi
Meskipun robot semakin cerdas secara individu, tanpa kemampuan kolaborasi berbasis kepercayaan, mereka akan tetap terisolasi. Fragmentasi di lapangan bersumber dari tiga masalah utama: identitas dan lokasi belum terstandar dan diverifikasi, membuat pihak luar sulit memastikan “siapa saya, di mana saya, apa yang saya lakukan”; skill dan data belum punya jalur otorisasi jelas untuk pemanggilan dan berbagi aman antar entitas; hak kontrol dan batas tanggung jawab belum tegas, parameter operasional, cakupan otorisasi, dan mekanisme audit sulit disepakati atau dilacak setelah eksekusi. FABRIC mengatasi semua kendala ini secara sistemik: menggunakan protokol terdesentralisasi untuk membangun identitas on-chain robot dan operator secara verifiable, menyediakan infrastruktur terintegrasi untuk publikasi dan match tugas, komunikasi terenkripsi end-to-end, rekam eksekusi, dan settlement otomatis, sehingga kolaborasi berubah dari “koneksi sementara” jadi “lembaga terdokumentasi.”
Secara teknis, FABRIC berperan sebagai lapisan jaringan yang menggabungkan “pemposisian, koneksi, dan penjadwalan”: identitas dan lokasi terus diverifikasi, node otomatis membangun relasi peer yang “terlihat dan kredibel”; channel point-to-point berfungsi sebagai tunnel terenkripsi on-demand, membuka opsi kontrol dan pemantauan jarak jauh tanpa IP publik atau konfigurasi jaringan rumit; keseluruhan proses tugas—mulai publikasi, penerimaan, eksekusi hingga verifikasi—distandardisasi dan didokumentasikan, memastikan distribusi profit dan refund deposit berjalan otomatis saat settlement, serta verifikasi “siapa, kapan, dan apa yang diselesaikan” untuk urusan kepatuhan dan asuransi. Berbagai aplikasi muncul secara alami: perusahaan dapat merawat perangkat di lokasi terpencil, pemerintah kota dapat mengubah layanan kebersihan, inspeksi dan pengiriman menjadi Robot-as-a-Service skalabel, armada kendaraan bisa melaporkan kondisi jalan secara real-time dan membangun peta kolaboratif, serta robot terdekat dapat langsung diterjunkan untuk 3D scan, survei bangunan, atau dokumentasi asuransi.
Karena identitas, tugas, dan settlement diatur satu jaringan, batas kolaborasi jadi jelas sejak awal, fakta eksekusi terverifikasi di akhir, dan pemanggilan skill memiliki biaya serta manfaat terukur. Ke depan, FABRIC berevolusi menjadi “application distribution layer” untuk kecerdasan mesin: skill beredar global secara terprogram, data hasil invocation mengalir balik ke model dan strategi, sehingga jaringan kolaborasi terus naik kelas dalam batas kepercayaan yang terjaga.
Web3 Menuliskan “Keterbukaan” ke Masyarakat Mesin
Industri robotika kini cepat terkonsolidasi di segelintir platform, dengan hardware, algoritma dan jaringan terkunci dalam ekosistem tertutup. Nilai utama desentralisasi ialah memungkinkan robot dari merek dan wilayah mana pun berkolaborasi, bertukar skill, dan menyelesaikan settlement di satu jaringan terbuka tanpa dominasi platform sentralistik. OpenMind menulis keteraturan baru melalui infrastruktur on-chain: setiap robot dan operator punya identitas on-chain unik (ERC-7777, standar identitas) beserta fingerprint hardware dan permission yang terverifikasi; tugas dipublikasikan, ditawar, dan dicocokkan di bawah aturan terbuka, menghasilkan proof terenkripsi on-chain dengan timestamp dan lokasi selama eksekusi; kontrak secara otomatis menuntaskan profit, asuransi, dan deposit setelah tugas rampung, hasilnya bisa diverifikasi real-time; skill baru menetapkan jumlah invocation dan daftar perangkat kompatibel via kontrak, mendukung sirkulasi global sekaligus melindungi kekayaan intelektual. Dengan demikian, ekonomi robot mengusung DNA anti-monopoli, komposabel, dan dapat diaudit sejak awal, dengan “keterbukaan” tertanam di protokol dasar masyarakat mesin.
Membantu Kecerdasan Berwujud Lepas dari Isolasi
Robot kini bergerak dari panggung pameran ke ranah keseharian: memantau ruang rawat, belajar skill baru di kampus, menjalankan inspeksi dan modelling di perkotaan. Tantangan utama bukan sekadar motor lebih bertenaga, tapi memberi kemampuan bagi mesin dari sumber berbeda untuk saling percaya, bertukar informasi, dan bersinergi; di luar aspek teknologi, distribusi dan rantai suplai menjadi kunci utama untuk ekspansi massal.
Strategi implementasi OpenMind berawal dari kanal distribusi, bukan tumpukan parameter. Bermitra dengan RoboStore (distributor Unitree terbesar di AS), OM1 diubah menjadi materi kurikulum dan kit eksperimen standar, sehingga pasokan hardware dan software terintegrasi menyebar serentak ke ribuan universitas Amerika. Sektor edukasi menjadi demand-side paling stabil, langsung menghubungkan OM1 ke pipeline developer dan aplikasi bertahun-tahun ke depan.
Untuk cakupan sosial yang lebih luas, OpenMind mengoptimalkan jaringan investornya membangun “channel ekspor software” berbasis platform. Ekosistem kripto seperti Pi memperkuat model tersebut, menciptakan flywheel positif yang menyatukan developer, pengguna, dan pelanggan berbayar. Channel edukasi menyediakan suplai stabil dan platform menghadirkan permintaan skala, sehingga OM1 dan aplikasi lapisan atas memperoleh jalur ekspansi yang dapat direplikasi.
Di era Web2, robot cenderung terkunci dalam stack vendor tertutup, dengan fungsi dan data tidak bisa lintas platform; setelah kurikulum terhubung dengan platform distribusi, OpenMind menjadikan keterbukaan sebagai pengaturan default: sistem yang sama masuk ke kampus, merambah industri, dan menyebar melalui jaringan platform, menjadikan keterbukaan kaidah utama dalam penerapan skala besar.
Disclaimer:
- Artikel ini diterbitkan ulang dari BlockBeats, seluruh hak cipta milik penulis asli BlockBeats. Jika terdapat keberatan atas penerbitan ulang ini, silakan hubungi tim Gate Learn untuk penanganan sesuai prosedur sesegera mungkin.
- Disclaimer: Seluruh pendapat dan pandangan dalam artikel ini hanya merupakan opini pribadi penulis dan tidak menjadi saran investasi apa pun.
- Terjemahan artikel ke bahasa lain disediakan oleh tim Gate Learn dan tidak boleh disalin, didistribusikan, atau dijiplak tanpa mencantumkan Gate.
Artikel Terkait

Apa Itu Narasi Kripto? Narasi Teratas untuk 2025 (DIPERBARUI)

Sentient: Menggabungkan yang Terbaik dari Model AI Terbuka dan Tertutup

Apa itu AIXBT oleh Virtuals? Semua yang Perlu Anda Ketahui Tentang AIXBT

Ikhtisar 10 Koin Meme AI Teratas

EMC: Kekuatan Baru yang Mendorong Integrasi Teknologi AI dan Blockchain
