A integração da abertura na sociedade das máquinas: OpenMind promove a união entre mente e ordem
Além dos Agentes de Inteligência Artificial, os robôs humanoides configuram outro grande domínio de aplicação na era da IA. Segundo um relatório da Morgan Stanley, o mercado global de robôs humanoides poderá superar os 5 biliões de dólares até 2050.
Com a evolução da inteligência artificial, os robôs passaram de simples braços mecânicos em fábricas para entidades capazes de atuar como companheiros no dia a dia, adquirindo perceção e compreensão graças à IA e até desenvolvendo capacidades de decisão autónoma. O obstáculo central reside na ausência de protocolos de comunicação padronizados: cada fabricante usa linguagens e lógicas próprias, com software incompatível e inteligência não partilhada. Equivale a ter um carro de uma marca e um Tesla—mas são incapazes de avaliar conjuntamente o estado das estradas, quanto mais cooperar em tarefas.
A OpenMind propõe-se resolver esta fragmentação. Não fabrica robôs; cria antes um sistema colaborativo para que eles comuniquem na mesma linguagem, sigam regras comuns e executem tarefas coletivamente. Como referência, o iOS e o Android permitiram a proliferação de aplicações móveis, o Ethereum criou o alicerce comum do mundo cripto, e a OpenMind pretende edificar um “sistema operativo” e a “rede colaborativa” global de robôs.
Em resumo, a OpenMind está a desenvolver um sistema operativo universal para robôs que lhes permite percecionar, agir e colaborar de forma segura e à escala em qualquer contexto, através de uma coordenação descentralizada.
Quem Apoia Esta Plataforma Aberta
A OpenMind concluiu rondas Seed e Série A, totalizando 20 milhões de dólares, lideradas pela Pantera Capital. Mais importante ainda, a “amplitude e complementaridade” do investimento reuniu quase todas as peças estratégicas do setor: de um lado, o investimento de longo prazo proveniente dos ecossistemas tecnológicos e financeiros ocidentais—Ribbit, Coinbase Ventures, DCG, Lightspeed Faction, Anagram, Pi Network Ventures, Topology, Primitive Ventures—entendem as mudanças estruturais na infraestrutura cripto e de IA, aportando experiência em modelos, redes e compliance para o “agent economy + machine internet”; do outro, o impulso industrial oriental—liderado pela cadeia de produção e fabrico da Sequoia China—conhece os requisitos técnicos e económicos necessários “para que um protótipo se torne produto escalável.” Esta sinergia proporciona à OpenMind não só financiamento, mas também recursos e caminhos “do laboratório à produção industrial, do software à engenharia de base.”

Esta trajetória está igualmente alinhada com os mercados financeiros tradicionais. Em junho de 2025, no lançamento do ETF Global Humanoid and Embodied Intelligence Index (KOID) da KraneShares, o robô humanoide Iris, desenvolvido em conjunto pela OpenMind e RoboStore, foi convidado a tocar o sino de abertura da NASDAQ, tornando-se o primeiro “robô convidado” a participar nesta cerimónia na história da bolsa. O evento representa a convergência das narrativas tecnológica e financeira e sinaliza publicamente “como os ativos de máquinas podem ser avaliados e liquidados.”
Segundo Nihal Maunder, sócio da Pantera Capital:
“Para que máquinas inteligentes operem em ambientes abertos, é indispensável uma rede aberta de inteligência. O trabalho da OpenMind para os robôs é comparável ao que o Linux representa para o software e o Ethereum para a blockchain.”
Da Investigação à Produção
Jan Liphardt, fundador da OpenMind, é Professor Associado em Stanford e ex-professor em Berkeley, com vasta experiência em investigação de dados e sistemas distribuídos, tanto académica como de engenharia. Defende o open-source, a substituição de sistemas proprietários por mecanismos auditáveis e rastreáveis, e o uso de metodologias interdisciplinares para integrar IA, robótica e criptografia.
A equipa principal da OpenMind inclui profissionais oriundos da OKX Ventures, Oxford Robotics Institute, Palantir, Databricks e Perplexity, cobrindo áreas críticas como controlo robótico, perceção e navegação, orquestração multimodal e LLMs, sistemas distribuídos e protocolos on-chain. Acresce uma equipa de consultores académicos e industriais (incluindo Steve Cousins, líder da robótica em Stanford, Bill Roscoe do Oxford Blockchain Center e Alessio Lomuscio, professor de IA e segurança no Imperial College) que garante que os robôs sejam “seguros, regulados e fiáveis.”
Solução OpenMind: Arquitetura Bifásica, Sistema Unificado de Ordem
A OpenMind criou uma infraestrutura reutilizável para colaboração e comunicação entre robôs, dispositivos, fabricantes e fronteiras nacionais:
Lado do Dispositivo: Disponibiliza o sistema operativo nativo de IA, OM1, para robôs físicos, ligando desde a perceção à execução, permitindo a máquinas de diferentes tipos interpretar o ambiente e realizar tarefas;
Lado da Rede: Desenvolve a rede colaborativa descentralizada FABRIC, que fornece mecanismos de identificação, alocação de tarefas e comunicação, assegurando que robôs se reconhecem, distribuem tarefas e partilham estados durante a colaboração.
Juntando “sistema operativo + camada de rede”, os robôs passam a colaborar, sincronizar processos e completar tarefas complexas numa rede global e unificada.
OM1: Sistema Operativo Nativo de IA para Robótica Real
Tal como os smartphones dependem do iOS ou Android para aplicações, os robôs também precisam de um sistema operativo para executar modelos de IA, processar dados de sensores, tomar decisões inteligentes e atuar.
OM1 é esse sistema operativo nativo de IA para robôs reais—confere capacidade para percecionar, compreender, planear e executar tarefas em múltiplos ambientes. Diferentemente dos sistemas convencionais fechados, o OM1 é open-source, modular, agnóstico ao hardware, e funciona em humanoides, quadrúpedes, veículos e braços robóticos.
Quatro Pilares: Perceção, Memória, Planeamento e Ação
OM1 estrutura a inteligência robótica em quatro etapas universais: Perceção → Memória → Planeamento → Ação. Cada etapa é modular e interligada por uma linguagem de dados unificada, permitindo que capacidades inteligentes sejam componíveis, substituíveis e verificáveis.
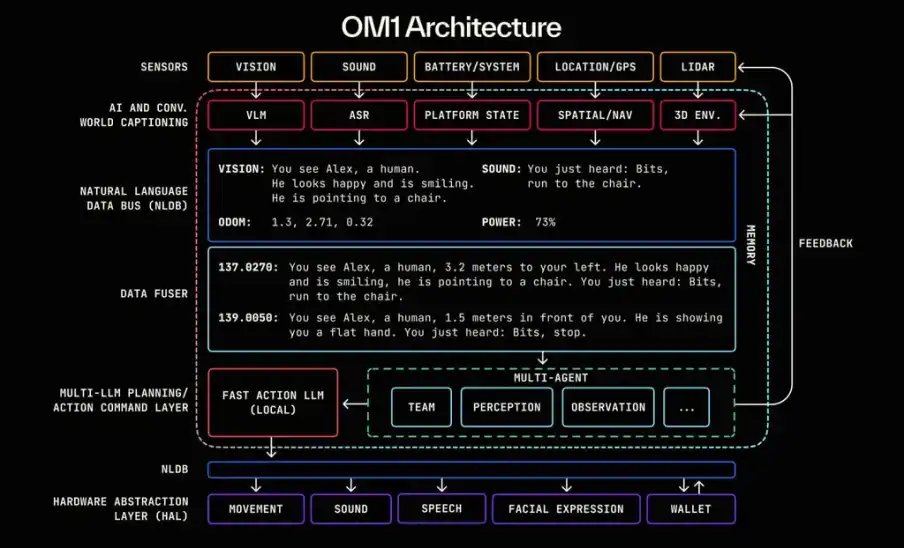
Arquitetura OM1
A arquitetura de sete camadas do OM1 funciona assim:
Camada de Sensores: capta dados—câmaras, LIDAR, microfones, nível de bateria, GPS e outras entradas multimodais.
Camada de IA + Legenda do Mundo: traduz dados—modelos convertem sinais visuais, áudio e estados em linguagem natural (“Vês uma pessoa a acenar”).
Natural Language Data Bus (NLDB): transmite dados—todas as perceções são convertidas em fragmentos de linguagem com timestamp, trocados entre módulos.
Data Fuser: combina dados—integra múltiplas fontes para criar contexto para tomada de decisão.
Camada Multi-AI Planning/Decision: gera planos—vários LLMs analisam o contexto e criam planos de ação, agregando regras on-chain.
Canal downstream NLDB: transmite decisões aos sistemas de hardware via camada intermédia de linguagem.
Hardware Abstraction Layer: executa comandos—traduz instruções em linguagem em comandos de baixo nível para o hardware (movimento, voz, transações, etc.).
Implementação Imediata, Escalabilidade Real
O OM1 criou um pipeline de desenvolvimento pronto a usar para converter rapidamente “ideias” em “tarefas robóticas”: programadores definem objetivos e restrições usando linguagem natural com modelos de grande dimensão, e geram pacotes de competências reutilizáveis em poucas horas; pipelines multimodais integram LiDAR, visão e áudio, eliminando código complexo para fusão de sensores; modelos integrados como GPT-4o, DeepSeek e VLMs permitem entrada/saída por voz automática; compatibilidade completa com ROS2 e Cyclone DDS, integração direta com Unitree G1, Go2, Turtlebot e braços robóticos via Hardware Abstraction Layer; ligação nativa às interfaces de identidade, orquestração de tarefas e liquidação on-chain do FABRIC, proporcionando robôs autónomos e colaborativos, com funcionalidades de pagamento por utilização e auditoria.
OM1 foi validado em múltiplos cenários: a plataforma quadrúpede Frenchie (Unitree Go2) executou tarefas complexas na Exposição USS Hornet 2024; a plataforma humanoide Iris (Unitree G1) realizou interações humano-máquina no stand da Coinbase na EthDenver 2025; OM1 entrou em cursos universitários americanos através do projeto educativo da RoboStore (maior distribuidor Unitree nos EUA), expandindo o paradigma para ensino e investigação avançados.
FABRIC: Rede Colaborativa Descentralizada Humano-Máquina
Mesmo que possuam inteligência individual avançada, sem colaboração fiável, os robôs continuam isolados. A fragmentação resulta de três desafios centrais: identidades e localizações não são padronizáveis nem verificáveis, impedindo confiança externa; competências e dados não têm autorizações seguras para partilha e acesso entre entidades; direitos de controlo e limites de responsabilidade são ambíguos, e os mecanismos operacionais são difíceis de validar. O FABRIC resolve estas questões: protocolos descentralizados criam identidades verificáveis on-chain para robôs e operadores, infraestruturas para publicação e atribuição de tarefas, comunicação encriptada, registos de execução e liquidação automática, transformando colaborações temporárias em instituições documentadas.
No dia a dia, o FABRIC funciona como camada de rede unificadora: identidades e localizações são continuamente verificadas, estabelecendo relações peer credíveis; canais ponto-a-ponto funcionam como túneis encriptados, facilitando controlo remoto e monitorização sem configurações complexas; todo o ciclo de tarefas—publicação, aceitação, execução e verificação—é padronizado e registado, permitindo distribuição automática de ganhos, reembolsos e certificação de execução para compliance e seguros. Exemplos práticos: empresas mantêm equipamentos remotamente, cidades transformam serviços urbanos em Robot-as-a-Service, frotas reportam obstáculos em tempo real, e robôs próximos são mobilizados para digitalização, levantamento técnico ou recolha de evidências.
Gestão integrada de identidade, tarefas e liquidação define previamente os limites da colaboração, verifica a execução e quantifica custos e benefícios de skills. No futuro, o FABRIC tornar-se-á camada de distribuição de aplicações para machine intelligence: competências circulam globalmente com autorizações programáveis, e dados de uso alimentam modelos e estratégias, promovendo evolução contínua da rede colaborativa sob normas auditáveis.
Web3 Inscreve a Abertura na Sociedade das Máquinas
A indústria da robótica converge rapidamente para plataformas fechadas, bloqueando hardware, algoritmos e redes. O valor da descentralização está em permitir que robôs de diversas marcas e regiões colaborem, partilhem competências e finalizem liquidações numa rede aberta, sem dependência de um operador único. OpenMind estrutura esta ordem com infraestrutura on-chain: cada robô e operador possui identidade exclusiva on-chain (ERC-7777), com impressões digitais e permissões verificáveis; tarefas são publicadas, leiloadas e atribuídas segundo regras públicas, com provas encriptadas on-chain, data e localização; contratos automatizam liquidação de ganhos, seguros e depósitos, com resultados auditáveis em tempo real; novas skills fixam limites de invocações e dispositivos compatíveis via contratos, viabilizando circulação global e proteção da propriedade intelectual. Desta forma, a economia robótica é inerentemente aberta, auditável e resistente a monopólios, com “abertura” gravada nos protocolos fundamentais da sociedade das máquinas.
Ajudar a Inteligência Embodiment a Sair do Isolamento
Os robôs estão a ingressar em ambientes quotidianos: monitorizam hospitais, aprendem competências em universidades, realizam inspeções e modelações em cidades. O desafio não é apenas motores mais potentes, mas sim garantir confiança, colaboração e troca segura de informação entre máquinas de diferentes proveniências; além disso, a distribuição e a escala são decisivas para a adoção massiva.
Por isso, a OpenMind começa pelo desenvolvimento de canais, não pelo mero ajuste de parâmetros. Em parceria com a RoboStore (maior distribuidor Unitree nos EUA), transformou o OM1 em currículo académico e kits experimentais normalizados, promovendo a integração de hardware e software em milhares de universidades norte-americanas. O sector educativo assegura uma procura estável, inserindo o OM1 diretamente na formação e pipelines de aplicação para os próximos anos.
Para distribuição mais ampla, a OpenMind utiliza o seu ecossistema de investidores para criar canais de exportação de software via plataformas. Ecossistemas cripto como Pi reforçam este modelo, gerando um ciclo virtuoso de programadores, utilizadores e clientes pagantes. Com canais educativos a assegurar oferta estável e a distribuição por plataformas a escalar a procura, o OM1 e as aplicações associadas seguem uma trajetória replicável de expansão.
No paradigma Web2, robôs ficavam presos em silos de fabricante, sem circulação de funções ou dados. Ligando padrões curriculares a plataformas de distribuição, a OpenMind torna a abertura padrão: o sistema penetra universidades, estende-se às indústrias e propaga-se por redes, posicionando a abertura como ponto de partida para adoção em escala.
Aviso Legal:
- Este conteúdo é republicado de BlockBeats, sendo o copyright da autoria original BlockBeats. Para questões sobre republicação, contacte a equipa Gate Learn, que dará seguimento tão rapidamente quanto possível conforme os procedimentos estipulados.
- Aviso: As opiniões expressas neste artigo representam exclusivamente o ponto de vista do autor e não constituem qualquer recomendação de investimento.
- As traduções deste artigo em outros idiomas são fornecidas pela equipa Gate Learn e não podem ser copiadas, distribuídas ou reproduzidas sem referência a Gate.
Artigos relacionados

O que são Narrativas Cripto? Principais Narrativas para 2025 (ATUALIZADO)

Explorando o Smart Agent Hub: Sonic SVM e seu Framework de Escalonamento HyperGrid

Qual plataforma constrói os melhores agentes de IA? Testamos o ChatGPT, Claude, Gemini e outros

Como os Agentes de IA Impulsionarão a Cripto no Mercado Principal

Tudo o que precisa de saber sobre GT-Protocolo
